電験2種二次試験に合格しましたのでこれまで内容を振り返ってみます。
電験2種を受験する理由
電気エンジニアとしてレベルアップしたい、知識を向上させたいという思いから受験を決意しました。また、電験2種が必要な仕事ではないのですが、2種は社内的に非常に強いアピールポイントになるのでそれも1つの動機でした。
合格までの流れ
2021年:2種受験を決意して一次試験の勉強を開始。
2022年:一次試験「理論」「機械」「電力」 合格、「法規」受験せず。
2023年:一次試験「法規」合格、二次試験合格
1年で一発合格するつもりはさらさらなく、2ヶ年計画で合格する計画でした。理由として、2年計画であれば二次試験に全力で望むチャンスが2回あるからです。1年目で一次試験4科目とってそこから二次試験の勉強を始めて合格するのは可能性として低いので、初めから2年計画で行きました。
一次試験の得意科目である理論と機械で9割以上を取れたことは二次試験への自信に繋がりました。
カフェジカ自己採点
— hyperkomatty (@komatty_denki) 2022年8月20日
理論→9割超えで楽勝💪
電力→60点超えてるので大丈夫なはず。
機械→あんまり自信なかったけど9割超え。ツイてる😙
この成績なら2ヶ年計画にしなくても良かったかも?
二次試験振り返り
二次試験の内容を振り返ってみます。以下の問題のタイトルは 電験王2 から引用させていただきました。
電力・管理科目
問1 圧力トンネルを伴うダム水路式発電所における水撃作用に関する論説問題 水力
問2 多導体送電線の利点とその理由に関する論説問題 送電
問3 等面積法を用いた過渡安定性に関する計算問題 送電
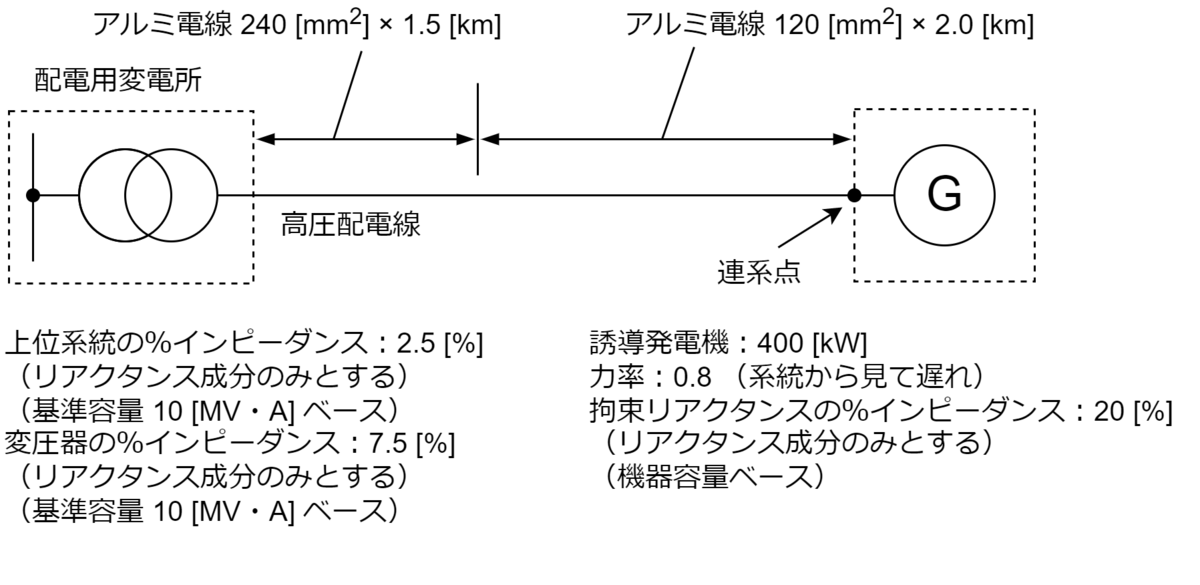
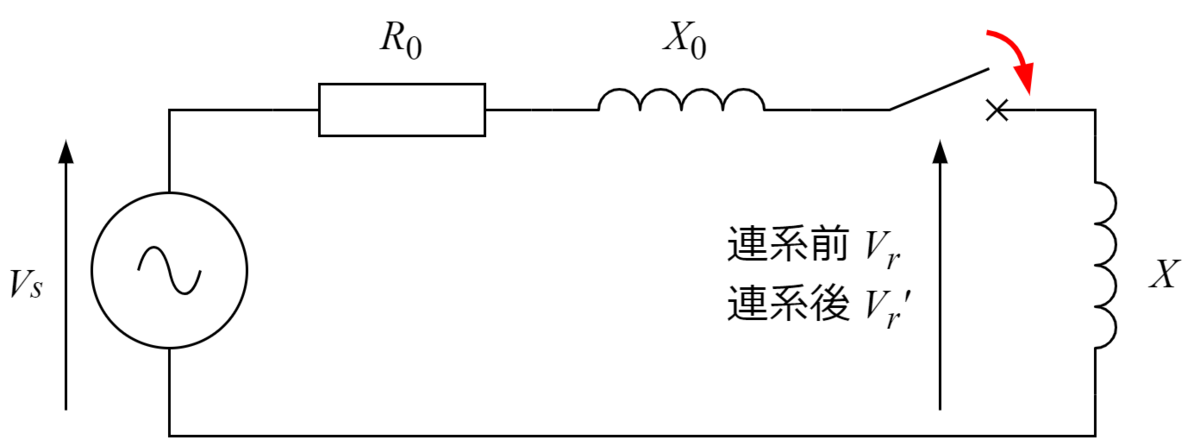
問4 分散型電源設置前後の電圧の導出に関する計算問題 配電
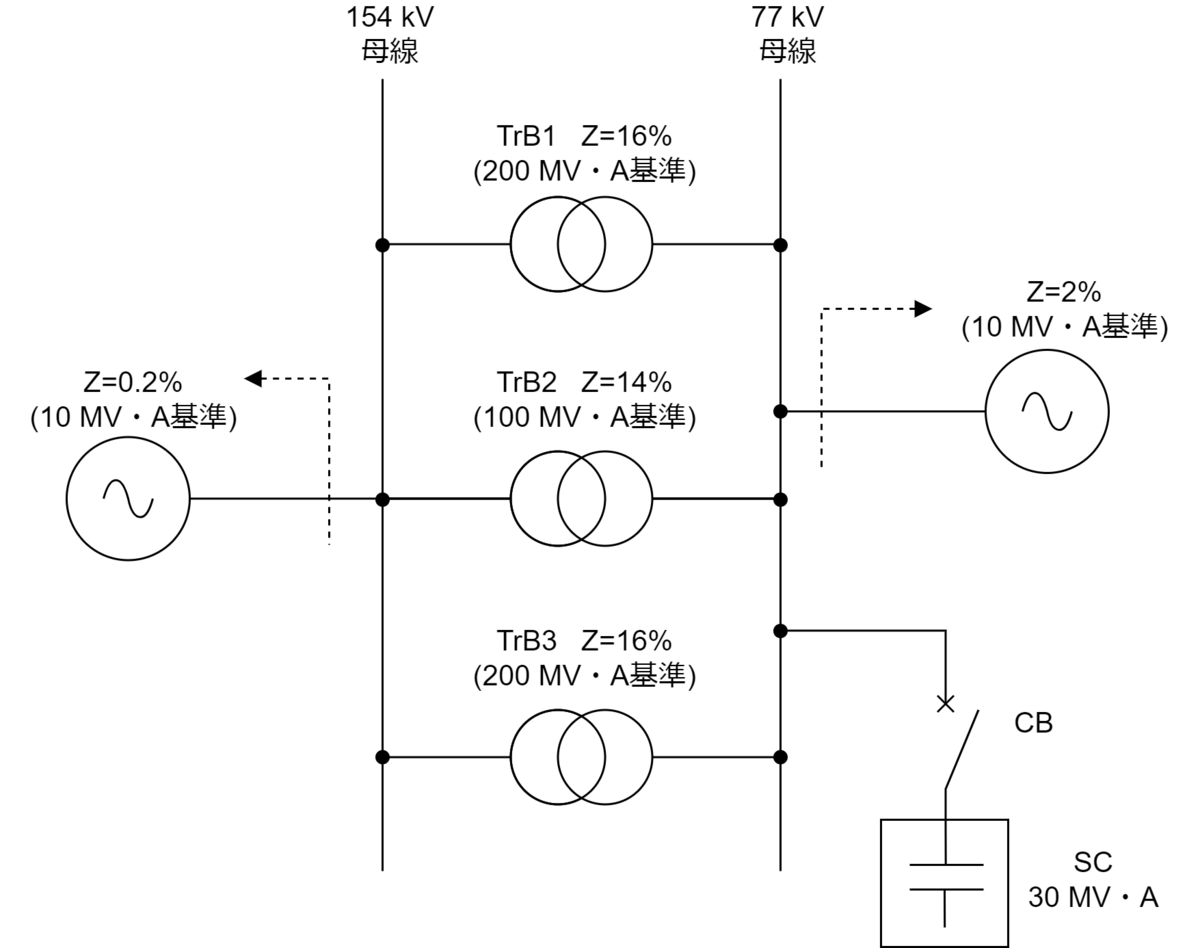
問5 中性点接地方式の目的と種類及び比較に関する論説問題 変電
問6 電力系統の周波数に関する計算・論説問題 電気施設管理
私は問3,4,5,6を選択しました。今回試験を受けたときにまず衝撃を受けたのは水力発電の問題が出題されたことでした。電験2種勢であればご存知の通り、水力、火力、水力、火力と毎年交互に出題されるのがこれまでのお決まりのパターンでした。去年は水力発電だったので、まさか今年に水力発電の問題が出題されるとは思っていませんでした。仕事柄、火力発電に関してはある程度の知識があったため楽観的に構えていて、水力の論説は全くフォローしていませんでした。よって問1はスルー。
問4,5は完全攻略にもあるオーソドックスな問題だったのでここで部分点が稼げたと思っています。問6の計算問題はOK、論説は×という感じです。あとは問2と問3で解けそうなほうで問3を選択しました。等面積法の計算は過去問をやってなかったので×でしたが、その手前の問題まではなんとか解きました。
手応えとしては120点中60~65点という感じでした。
機械・制御科目
問1 同期発電機の誘導起電力や電力,安定度に関する計算問題 同期機
問2 V結線した変圧器の各特性に関する計算問題 変圧器
問3 電力用能動フィルタに関する論説・計算問題 パワーエレクトロニクス
問4 ゲイン特性曲線からの伝達関数の導出に関する計算問題 自動制御
私は問1と問2を選択しました。全体的に前年度に比べて非常に難化した印象を持ちました。特に問4の制御は、ゲイン特性曲線から伝達関数を導出するトリッキーな問題。ブロック線図から伝達関数やゲイン特性を求めるいつもパターンとは異なり、初見で解くのは難しい印象でした。4、5分考えたけど無理そうなので切り替えて問1と問2にしました。制限時間60分のうちの4、5分ロスしてしまったのは非常に痛かったです。
問1は前半のベクトル図を導出して答えるところはOK、後半は×でした。時間に余裕あって落ち着いて考えたら後半も取れた感じがありました。
問2は完全攻略に載ってる問題(平成25年度)とほぼ同じでした。V結線変圧器の問題はベクトル図を描くのが難しいのですが、今回はベクトル図が問題に載っていたため幸い最後まで解くことができました。問2は全部正答取れました。
手応えとしては60点中45点という感じでした。機械・制御の計算問題にはかなりの自信があって、満点取って電力管理の点をカバーする気持ちだったのでこの結果は正直落ち込みました。
2科目合計で105~110点(58~61%)くらい。合格点の引き下げがあれば行ける?難化してるから引き下げあるかも?とわずかな期待感を持ちつつ合格発表を待っていました。結果は無事合格でしたが、今回合格できたのはかなり微妙なラインだったと思っています。
電験2種の勉強方法
私が実際にやった勉強方法を紹介します。
一次試験の勉強方法
一次試験対策は基本的にテキストと過去問が中心です。テキストは徹底マスターを使用していました。電験王で購入した過去問(PDFを印刷したもの)をひたすら解いていって、わからないところがあれば徹底マスターの該当箇所を読む、という感じです。最初は「これだけシリーズ」を購入しましたが内容が基礎的すぎて物足りなく感じたため徹底マスターを購入しました。機械・電力・法規の3種類を購入しました。理論は自信があったので参考書は不要でした。
")
徹底マスターは細かいところまで解説がされていて非常に勉強になりました。二次試験を勉強する際にも使えるので持っておいて損はないです。試験が終わったあとも処分することはないと思います。
また、機械と電力を理解するためにYouTubeも活用しました。特にオススメなのはAki塾長さんのチャンネルです。電験3種用のチャンネルですが2種一次試験にも有効です。誘導機、同期機、直流機の動画の解説は非常に参考になります。
二次試験の勉強方法・計算問題
二次試験対策を始めるにあたって、まず以下の資料を一通り読みました。二次試験の範囲の内容がまとめられており二次試験が大体どんなものか理解できます。
電験2種2次 単元pdf置き場 | 電験3種「理論」最速合格
その後は皆さんお馴染みの不動先生の完全攻略を使用しました。二次試験の計算問題はこの本だけやってたらOKだと思います。自分も何周したのかわからないくらい解きまくりました。2回正答できた問題は飛ばして、間違えた問題をひたすら解いていくというやり方です。その結果、制御は現代制御以外バッチリという状態にまで仕上がりました。二次試験対策は完全攻略をやりまくった。これに尽きます。
: 過去問240問を体系的に学ぶ")
二次試験の勉強方法・論説問題
論説問題対策には「キーワードで覚える」を購入しましたが結局あまり使わずじまいでした。

自分の知らない内容を文字と図だけで覚えるのはやっぱりしんどいです。自分の業務に関わりある内容ならまだしも、水力発電とかケーブルの水トリーとか、見たことも扱ったこともない話は全く頭に入らないです。
そういうわけで二次試験の電力管理の対策については「論説問題は自分が知ってる内容だけはカバーしておく。それ以外は捨てる。計算問題で点を稼ぐ」という戦略にしました。論説問題も完全攻略に載っている内容しかフォローしていません。ノートを取ったり文字に書き起こしたりということもしませんでした。1回読んで理解できないものは諦めるというスタイルです💦
発電、送電、配電に関しては以下のYouTubeチャンネルがオススメです。YouTubeにある動画の中でもこの方の動画が一番詳しくて非常にわかりやすいです。
また、ノートに整理することはしませんでしたが、ブログには電験問題に関係する記事を継続して書いていました。それが論説対策の1つになったと思います。人に説明するために文章を書くという点ではブログに書く行為は非常に有効でした。
まとめ
以上が私の電験2種合格記です。今の時代はネットで良質な情報が無料で手に入って、良質な参考書もたくさん揃っているので本当にいい時代だと思います。Twitterで電験仲間を見つけることも勉強のモチベーションにもなります。わからない問題があってもTwitterに投稿すれば誰か(1種 or 2種保有者)が教えてくれる。本当に素晴らしいし、ありがたいです。電験の世界において「知の高速道路」が敷設されていることを身を持って実感します。この記事の内容がこれから電験2種を受けられる方の手助けになれば幸いです。