PID制御のパラメータの調整方法というと Ziegler–Nichols の調整法が一番有名ですが、Lambda tuning methodというのもあるようです。日本語の情報がなかったので自分用メモ。
Lambda tuningについて
むだ時間+一次遅れ系のPIコントローラーに適用できる。ただし、むだ時間の長いプロセス(むだ時間≧時定数)には不適。
Ziegler–Nicholsのステップ応答法と違うのはゲインと積分時間を求める式が異なる点。
Lambda tuningの特徴
- オーバーシュートさせたくない制御対象に有効。
- PIコントローラのみに適用可。PDおよびPIDコントローラには使えない。
- Ziegler–Nicholsに比べると応答性は遅いが、その分、安定性・ロバスト性は高くなる。外乱に対しても安定した制御を得られる。
- Ziegler–Nicholsの場合、プロセスのむだ時間の値を読み違えると制御の結果が大きく変わってしまうが、Lambda tuningならむだ時間が多少違ってても影響が小さい。
パラメータ調整方法
調整手順
手順は以下の通り。まずはステップ応答テストにより制御対象のプロセスの特性を求める。それらを用いてPIコントローラのゲインと積分時間を決定する。
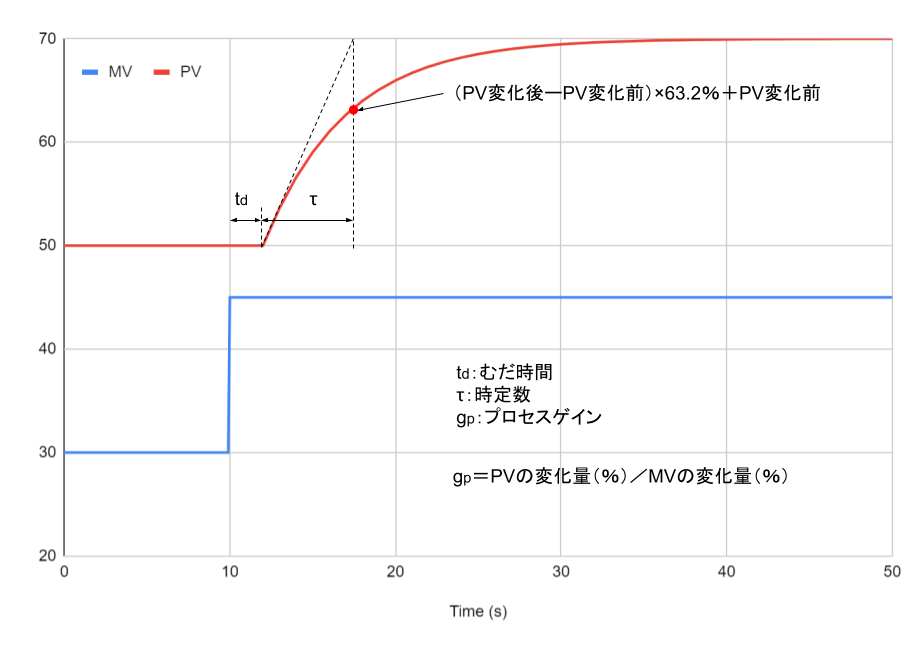
- まずコントローラーをMANUALに切り替える。
- PVの値が落ち着くのを待つ。
- MVを手動でいくらか増やす。
- PVが徐々に上昇し、値が落ち着くのを待つ。
- PVのトレンドより、むだ時間td、時定数τ、プロセスゲインgp(PVの変化量とMVの変化量の比)をそれぞれ求める。
- td, τ, gp の値からPIゲインKc、積分時間TIを決定する。
制御ゲインKC、積分時間TI
制御ゲイン:
積分時間:
λを調整して制御の応答性を調整する。
λについて
が推奨。λが長いほど、制御の応答が遅くなる。
- 例えば
- より応答性を早めたいときは
にする。
だとさらに応答が早くなるがその分、安定性が低下する。
Lambda tuningのコンセプトは応答を長くして安定性を高めることにある。なので、制御の応答性を求める場合は他の調整方法を試したほうが良い。