むだ時間の長いプロセスにおける制御手法の一種であるサンプルPI制御(サンプル値PI値)について紹介します。
むだ時間の長いプロセス制御は難しい
むだ時間が非常に長いプロセスでは通常のPID制御ではうまく制御が出来ません。通常、フィードバック制御は、
- PVとSVの偏差から操作量MVが演算されて調節計から出力される。
- 測定値PVが変化する。
- PVとSVの偏差から操作量MVが演算されて調節計から出力される。
- 測定値PVが変化する。
の繰り返しを行います。しかし、むだ時間が非常に長いプロセス、例えば「MVを変えてPVの変化として現れるのは数分後」みたいなプロセスだと、その間に積分要素がどんどん溜まっていってうまく制御できません。
※ 厳密に言うと、むだ時間が長くても同様に時定数も長ければ通常のPID制御でも制御可能です。着目するポイントはむだ時間/時定数比(L/T比)で、L/T比が大きいとうまくフィードバック制御が出来ません。
サンプルPI制御の概要
サンプルPI制御は一定時間だけPI制御を実行し、その後、一定時間MV値をホールドする制御手法です。操作量MVの変化は次のような図になります。
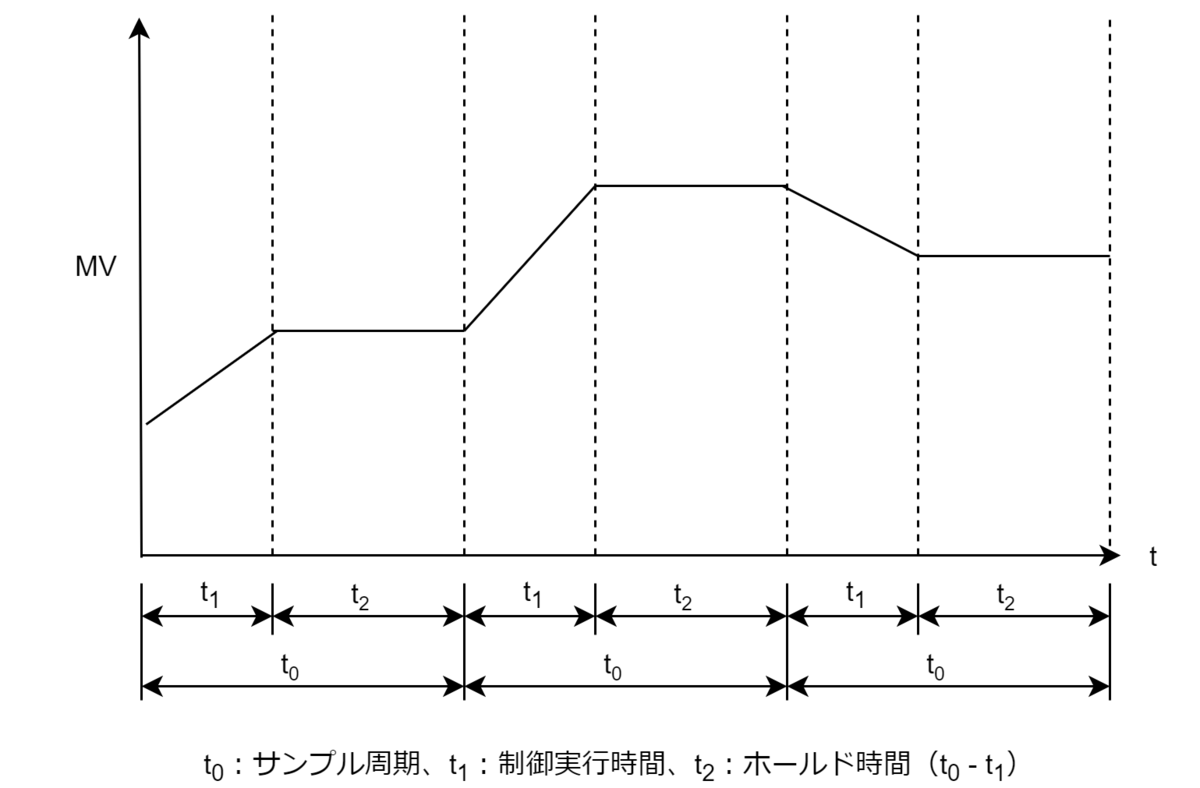
一定時間だけMVを変化させて一旦ホールドし、むだ時間が経過してPVの変化が表れたらまた演算を実行するというやり方です。バルブの操作で例えると、バルブをちょっとだけ動かして止めて様子を見てからまたバルブを調整する、というイメージです。
サンプル周期の目安は、むだ時間Lに時定数Tの2~3倍を加えた時間です。むだ時間よりやや長くするのがミソです。また、制御実行時間はサンプル周期の1/10程度が目安とされています。
MV演算式
サンプルPI制御の制御実行中の出力変化量ΔMVnの演算式は以下の通りです。
KP:比例ゲイン
en:偏差
en-1:前回値偏差
ΔT:PID調節計の実行周期
TI:積分時間
ホールド中は となって、MV値が一定時間ホールドされます。
その他
むだ時間の長いプロセスの制御として他にはスミス法(むだ時間補償制御)が有名ですが、スミス法はプロセス特性の変動や同定誤差の影響を大きく受けやすい欠点があります。それに比べてサンプルPI制御は変動や誤差の影響を受けにくいメリットがあります。サンプルPIはスミス法に比べて簡単かつ実用的なむだ時間対策の制御手法と言えます。
参考文献、参考サイト
- 広井和男 『ディジタル計装制御システムの基礎と応用』工業技術社、1992年
- 三菱電機株式会社:PX Developer プログラミングマニュアル
https://www.mitsubishielectric.co.jp/fa/products/faspec/download.do?kisyu=/plcq&formNm=650058910&category=ex&id=spec - エムエスツデー 1998年5月号 自動制御入門 第14回 各種の制御手法(その2)
https://www.m-system.co.jp/mstoday1/MSTback/data/98/05/Nyumon.htm